Dənizlərin dibi həm radiasiya ilə çirkləndirildiyinə, həm də dərinliyinə görə insanlar üçün təhlükəli yerlərdir. Elektronika və kompyuter texnologiyasındakı nailiyyətlər bizə bu cür yerlərdə fəaliyyət göstərə bilən robotlar istehsal etməyə imkan vermişdir. Tədricən bu sahə elektronika və mexanikadan ayrılaraq elmdə xüsusi yer tutan robotikanı meydana gətirdi. Robotika sahəsi ilə məşğul olan elm adamları və mühəndislər xüsusi məqsəd üçün robotların dizayn edilməsinin heç də asan olmadığını düşünürlər.
Bu səbəbdən, bir canlını və ya o canlının bir xüsusiyyətini təqlid edən robotlar istehsal etmək daha məqsədəuyğun hesab edilir. Məsələn, səhrada aparılan tədqiqat üçün əqrəbə və ya qarışqaya, dəniz dibindəki bir araşdırma üçün isə balığa və ya xərçəngə bənzəyən robot düzəltmək... "Biomimetik robotik"in maraq sahəsinə belə robotlar daxildir. "Biomimetik robotlar üçün sinir texnologiyası" (Neurotechnology for Biomimetic Robots) adlı kitabda bu mövzu ilə əlaqədar belə deyilir:
Biomimetik robotlar sürətli, daha ucuz və dünya şəraitinə tab gətirə bildikləri üçün ənənəvi robotlardan fərqlənir. Bu robotların quruluşu əsaslandıqları bioloji sistemlərin biomexanika və fiziologiya sahələrində başa düşülməsindən qaynaqlanır.
İnsan operatorlara ehtiyac duymadan, yalnız hissi təsirə əsaslanaraq ətrafdakılarla əlaqəyə girən və istiqamətini müəyyən edə bilən müstəqil robot istehsal edə bilir.
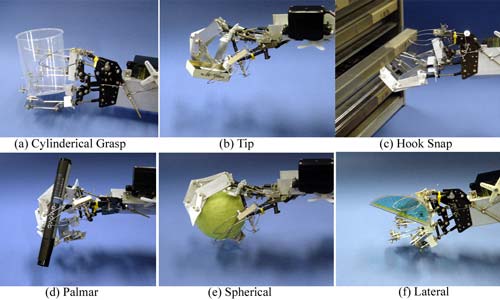
Elm adamlarını təbiətdəki canlıları təqlid etməyə sövq edən şey onların qüsursuz bədən quruluşlarıdır. "Karlsruhe əli" adlanan robot əlini düzəldən Hans J. Schneebeli bu mövzuda bunları deyir:
Robot əllər üzərində nə qədər çox işləyirəmsə, insanların sahib olduqları əllərə bir o qədər heyran oluram. İnsan əlinin gördüyü işin bir qisminə belə çatmağımız üçün daha çox zaman keçməlidir.
Bəzən bir canlının bir xüsusiyyətini belə təqlid etmək üçün kompyuter, mexanika, elektronika, riyaziyyat, fizika, kimya və biologiya kimi elm sahələrinin mütəxəssisləri bir yerdə işləməlidir.
Robotika elmi tarazlıq problemini aradan qaldırmaq üçün ilanları təqlid edirRobot elmi ilə məşğul olanların ən çox qarşılaşdıqları problemlərdən biri də tarazlıqdır. Ən son texnologiya üsulları ilə düzəldilən robotlar belə gedərkən tarazlıqlarını itirirlər. Robotlar 3 yaşlı uşağın rahatlıqla öhdəsindən gəldiyi "tarazlığı yenidən bərpa etmə" xüsusiyyətindən məhrumdurlar. Belə ki, NASA-nın Mars planetindəki tədqiqatlar üçün hazırladığı robot bu problemə görə istifadə edilməmişdir. Mütəxəssislər robota tarazlığı təmin edən qurğu qurmaq yerinə, tarazlığı pozulmayan bir canlını - ilanları təqlid edərək problemi həll etməyə çalışmışlar.
İlanların bədəni digər heyvanlardan fərqlənir. Onlar oyuqlara və çatlaqlara girə biləcək şəkildə yaradılmışdır. Onurğalılar kimi bərk skeletləri və üzvləri yoxdur. Gövdələrinin diametrini böyüdüb kiçildə bilirlər. Budaqlara sarıla bilir və qayaların üstündən keçə bilərlər. İlanların bu xüsusiyyətləri NASA Araşdırma Mərkəzi tərəfindən inkişaf etdirilən və "snakebot" adlandırılan insansız kosmos vasitəsinə ilham qaynağı olmuşdur. Hazırlanan ilan-robotun maneəni dəf etməsi və daim tarazlıq halında irəliləməsi düşünülür.
İç qulaqdakı tarazlıq mərkəzi robotika mütəxəssislərini heyrətləndirirBütün bədənimizə hər saniyə nəzarət edən tarazlıq sistemimizin əhəmiyyətli hissəsi iç qulaqdadır.
İç qulaqdakı tarazlıq mərkəzi "labirint" adlanır. Labirint yarımdairə şəklində üç kiçik sümükdən meydana gəlir. Bu sümüklərin içi şar kimi boşdur. Yarımdairələrin diametrləri 6,5 millimetr, içlərindəki boşluğun diametri isə 0,4 millimetrdir. Hər üç yarımdairə də xüsusi bucaqlarla bir-birlərinə bağlanır. Bu bucaqlar araşdırıldıqda hər yarımdairənin üç ölçülü həndəsənin əsası olan x, y və z koordinatlarına uyğun olduğu ortaya çıxmışdır.
Labirintdə olan üç yarımdairənin hər birinin içində xüsusi maye var. Bu mayenin içində tükcüklü hüceyrələr var. Biz başımızı sağa-sola çevirərkən, gedərkən və ya hərəkət edərkən bu yarımdairələrin içindəki maye hərəkət edir və tükcüklər titrəyir. Tükcüklərdəki bu titrəmə, eynilə ilbizdə olduğu kimi, tükcüklərin bağlı olduğu hüceyrələrin ion tarazlığını dəyişdirir və elektrik siqnalı yaranır.
İç qulaqdakı labirintdə yaranan elektrik siqnalları labirintdən çıxan sinirlər vasitəsilə beynimizin arxa tərəfindəki "beyincik" adlanan orqana çatdırılır. Labirintdən beyinciyə mesaj ötürən sinirlər araşdırıldıqda bunların içində 20 min kiçik sinir lifi olduğu müəyyən olunmuşdur.
Beyincik iç qulaqdakı labirintdən gələn bu məlumatları hər an şərh edir. Ancaq tarazlığı təmin etmək üçün başqa məlumatlara da ehtiyac var. Bu səbəbdən, beyincik gözlərdən və bədənin hər tərəfindəki əzələlərdən də daim məlumat alır. Bu məlumatları çox sürətlə analiz edir və bədənin Yerin cazibə qüvvəsinə görə mövqeyini hesablayır. Sonra bu hesablamaya əsaslanaraq əzələlərin hərəkətini təyin edir. Ortaya çıxan nəticə əzələlərə yenə sinirlər vasitəsilə bildirilir.
Bu fövqəladə əməliyyatlar saniyənin yüzdə biri qədər belə sürməyən zaman ərzində reallaşır. Biz də içimizdə reallaşan bu möcüzənin fərqində olmadan rahatlıqla gedir, qaçır, ən çətin idman hərəkətlərini edirik. Halbuki, bu işlərin bir anı üçün bədənimizdə reallaşan hesablamaları kağıza yazsaq, minlərlə səhifə düstur yazmalı olarıq.
Tarazlıq sistemi bir-biri ilə əlaqəli şəkildə kompleks mexanizmin uyğunluq içində işləməsi ilə yaranan qüsursuz sistemdir. Müasir elm və texnologiya isə bu sistemi nəinki təqlid edə bilmir, hətta onun iş prinsiplərini belə detalları ilə həll etməyi bacarmır.
Səhranın çətin şəraitinə tab gətirən robot- əqrəbABŞ-da fəaliyyət göstərən DARPA agentliyinin proyektlərindən biri də robot- əqrəbdir. Proyektdə əqrəb modelinin seçilməsinin səbəbi onun çox çətin şəraitli səhralarda yaşaya bilməsi və torpaqda asanlıqla irəliləyə bilməsidir. Bundan başqa, əqrəbin refleksləri məməlilərinkindən daha sadədir, buna görə də onu təqlid etmək daha asandır.
Tədqiqatçılar robotu düzəltmədən əvvəl əqrəblər üzərində uzun müddət müşahidə aparmışlar. Əqrəbin bütün oynaqları işarələnmiş və hərəkəti iki kamera ilə qeydə alınmışdır.
Sonra bu əqrəbin hərəkət əsnasında ayaqları arasındakı koordinasiya model əqrəbə uyğunlaşdırılmışdır.
Əqrəb proyektində robotun vəzifəsi səhrada 40 kilometr uzaqda olan bir hədəfə girmək və geri dönməkdir. Robot bu vəzifəni özü icra etməli, ona heç bir istiqamət verilməməlidir.
Boston North Eastern Universitetinin əməkdaşları Frank Kirchner və Alan Rudolph tərəfindən hazırlanan 50 santimetrlik əqrəbin kompleks problemləri həll etmə qabiliyyəti yoxdur. Robot- əqrəb bir problemlə qarşılaşdıqda yalnız refleksləri ilə hərəkət edir. Bu, onu dayandıracaq hər hansı bir şeyin, məsələn, bir qayaya rast gəlmənin öhdəsindən gəlməsinə imkan verir. Robotun qarşısında iki ultrasonik qəbuledici var. Əgər boyunun yarısından yüksək bir maneə ilə qarşılaşsa, ətrafını fırlanmağa çalışacaq. Əgər sol tərəfdəki dedektor bir maneəyə rast gəlsə, avtomatik olaraq sağa yönələcək. Bu robot müəyyən bir bölgəyə gedib, quyruğundakı kamera ilə şəkil çəkməlidir.
ABŞ ordusu əqrəbin Arizonadakı sınaqlarından çox təsirlənmişdir. Robotun yolunu tapma qabiliyyətinin şəhərlərdə maneələrlə dolu olan döyüş sahələrində faydalı olması ümid edilir.